Offline Phase: generating reduced coefficient maps
Aim of this notebook: implement the map between the parameters \(\boldsymbol{\mu}\) and the reduced coefficients, to be used in the online phase during the parameter estimation phase and the POD-I.
To execute this notebook: have the reduced coefficients from POD and GEIM saved in Offline_results.
[1]:
import numpy as np
import pickle
import matplotlib.pyplot as plt
from matplotlib import cm
from scipy import interpolate as interp
path_offline = './Offline_results/'
The temperature coefficient are coming from GEIM, whereas the pressure and velocity from POD.
[2]:
geim_var_names = ['norm_T']
pod_var_names = ['p', 'U']
geim_tex_var_names = ['T']
pod_tex_var_names = ['p', r'\mathbf{u}']
Let us import the reduced coefficients for GEIM (temperature) and POD (pressure and velocity)
[3]:
geim_coeffs = pickle.load(open(path_offline+'coeffs.geim', 'rb'))
pod_coeffs = pickle.load(open(path_offline+'coeffs.pod', 'rb'))
The snapshots are dependent on two different parameters: the Reynolds and the Richardson number, split into train and test set \begin{equation} Re_{train} = [15:5:150] \qquad\qquad Ri_{train} = [0.2:0.4:5] \end{equation}
[4]:
dRe = 5.
dRi = 0.4
# Train Parameters
Re_train = np.arange(15, 150+dRe/2, dRe)
Ri_train = np.arange(0.2, 5+dRi/2, dRi)
Ri, Re = np.meshgrid(Ri_train, Re_train)
mu_train = np.column_stack((Re.flatten(), Ri.flatten()))
Mapping the coefficients of the observable fields
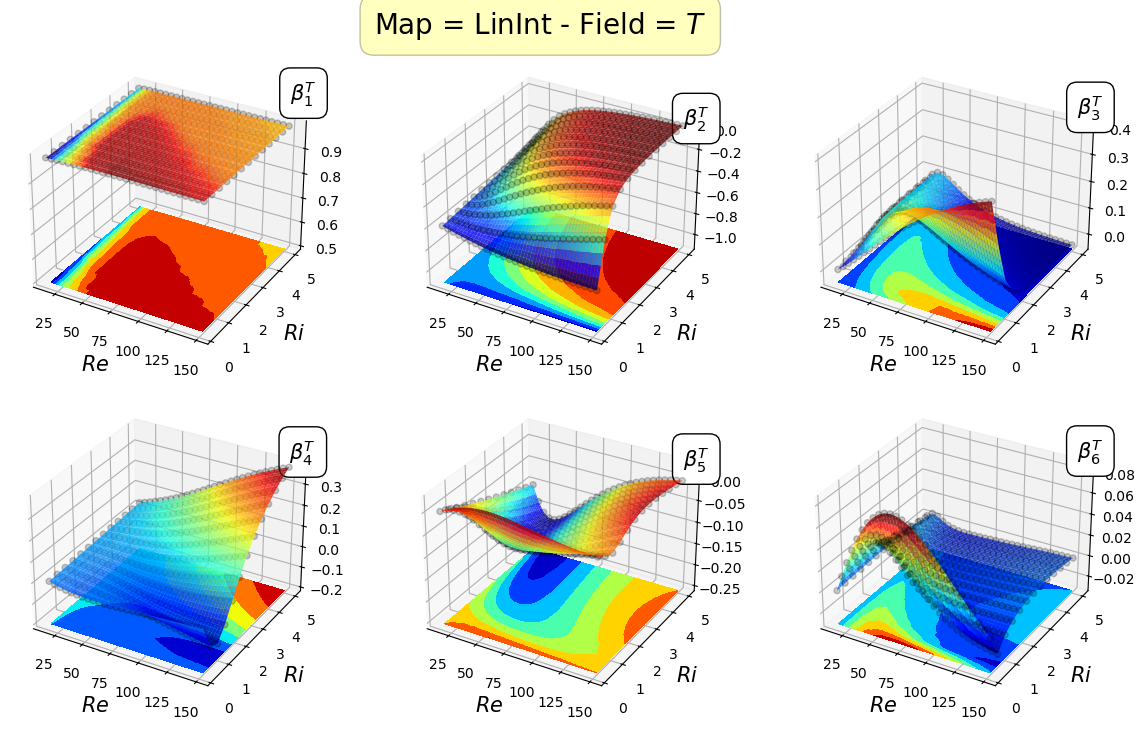
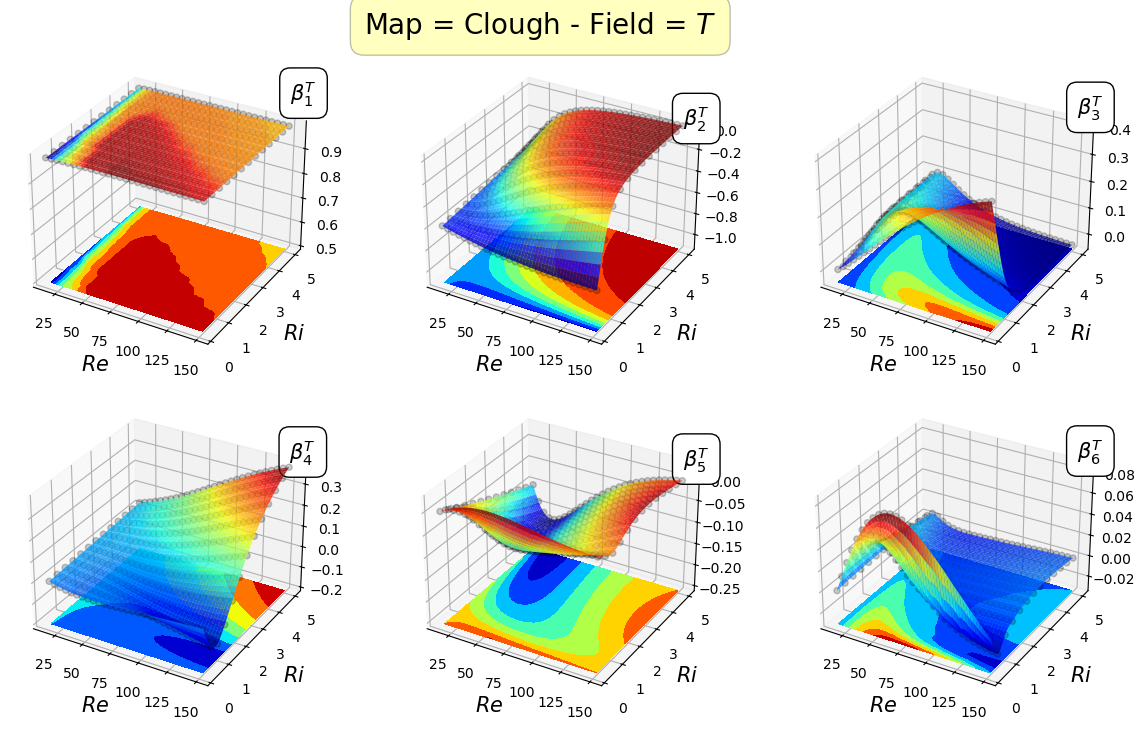
In this section, the reduced coordinate obtained by the GEIM algorithm, i.e., \(\boldsymbol{\beta}^T\), observable fields (only temperature in this case) will be mapped \begin{equation*} \mathcal{F}_T: \boldsymbol{\mu} \longrightarrow \boldsymbol{\beta}^T(\boldsymbol{\mu}) \end{equation*} This is needed in the Parameter Estimation phase: a minimisation problem has to be solve, i.e. \begin{equation*} \mu^\star = \text{arg }\min\limits_{\mu\in\mathcal{D}} \|{B\bm{\beta}^T(\mu)-\mathbf{y}^{T,obs}}\|^2_2,\qquad\qquad \text{s.t. }\bm{\beta}^T(\mu) = \mathcal{F}_{T}(\mu). \end{equation*} See Introini et al. (2023) and Riva et al. (2023) for more details.
Two different interpolation strategies to learn the map are considered: piecewise linear interpolation and Piecewise cubic interpolation, implemented in the scipy package.
[15]:
geim_maps = dict()
Mmax = 20
for field in geim_var_names:
geim_maps[field] = dict()
geim_maps[field]['LinInt'] = [interp.LinearNDInterpolator(mu_train, geim_coeffs[field][:, rank]) for rank in range(Mmax)]
geim_maps[field]['Clough'] = [interp.CloughTocher2DInterpolator(mu_train, geim_coeffs[field][:, rank], rescale=True) for rank in range(Mmax)]
Before plotting, we can store them using pickle
[16]:
pickle.dump(geim_maps, open(path_offline+'maps.geim', 'wb'))
Let us plot the maps for the first 8 coefficients
[21]:
field_i = 0
field = geim_var_names[field_i]
Re_plot = np.linspace(min(mu_train[:,0]), max(mu_train[:,0]), 200)
Ri_plot = np.linspace(min(mu_train[:,1]), max(mu_train[:,1]), 100)
xx, yy = np.meshgrid(Re_plot, Ri_plot)
nrows = 2
ncols = 3
for map in list(geim_maps[field].keys()):
fig, axs = plt.subplots(nrows = nrows, ncols = ncols, figsize=(5 * ncols, 4 * nrows),
subplot_kw={'projection': '3d'})
axs = axs.flatten()
for rank in range(nrows * ncols):
axs[rank].scatter(mu_train[:,0], mu_train[:,1], geim_coeffs[field][:, rank], c='k', marker ='o', alpha = 0.2)
eval_map = geim_maps[field][map][rank](xx, yy)
surf = axs[rank].plot_surface(xx, yy, eval_map, cmap = cm.jet, alpha=0.8)
axs[rank].contourf(xx, yy, eval_map, cmap = cm.jet, offset = min(geim_coeffs[field][:, rank]) * (1 - 0.5 * np.sign(min(geim_coeffs[field][:, rank]))))
axs[rank].set(zlim=(min(geim_coeffs[field][:, rank]) * (1 - 0.5 * np.sign(min(geim_coeffs[field][:, rank]))), max(geim_coeffs[field][:, rank])))
axs[rank].set_xlabel(r'$Re$', fontsize=15)
axs[rank].set_ylabel(r'$Ri$', fontsize=15)
axs[rank].text(max(Re_plot), max(Ri_plot), max(geim_coeffs[field][:, rank]) * 1.1, r'$\beta_{'+str(rank+1)+'}^'+geim_tex_var_names[field_i]+'$', fontsize=15,
bbox=dict(facecolor='white', edgecolor='black', boxstyle='round,pad=0.5', alpha=1))
fig.subplots_adjust(hspace=0.1, wspace=0.05, top = 0.925)
fig.suptitle('Map = '+map+' - Field = $'+geim_tex_var_names[field_i]+'$', fontsize=20, bbox=dict(facecolor='yellow', edgecolor='black', boxstyle='round,pad=0.5', alpha=0.25))
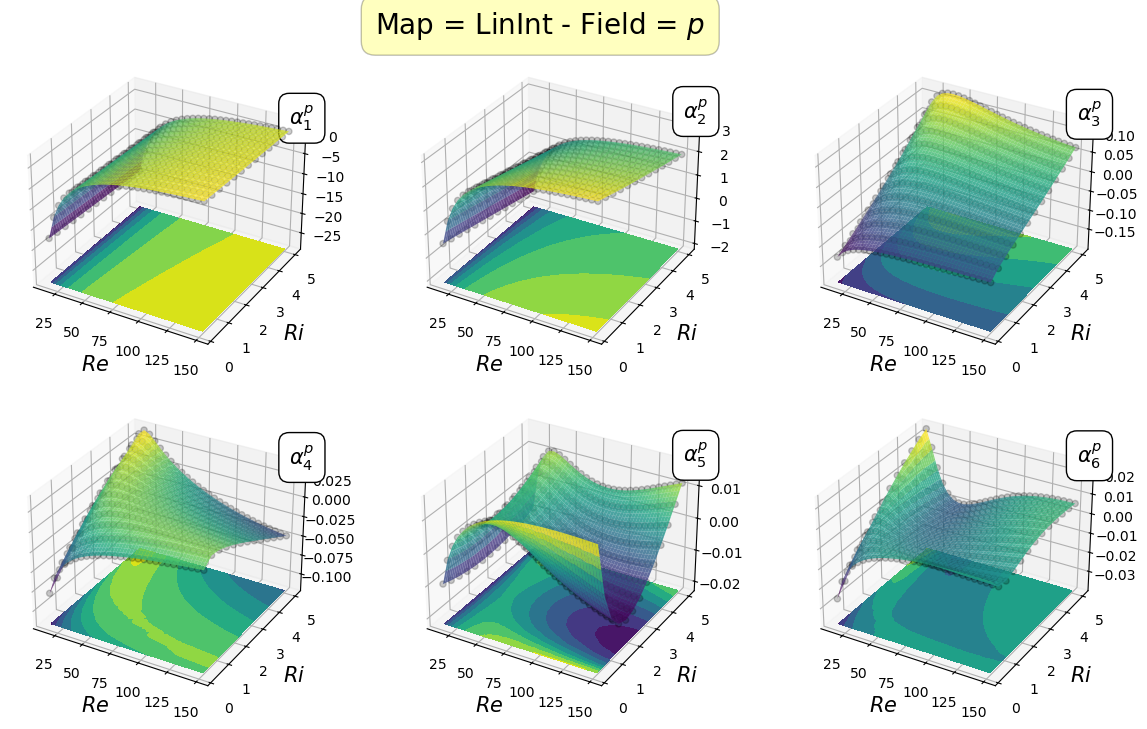
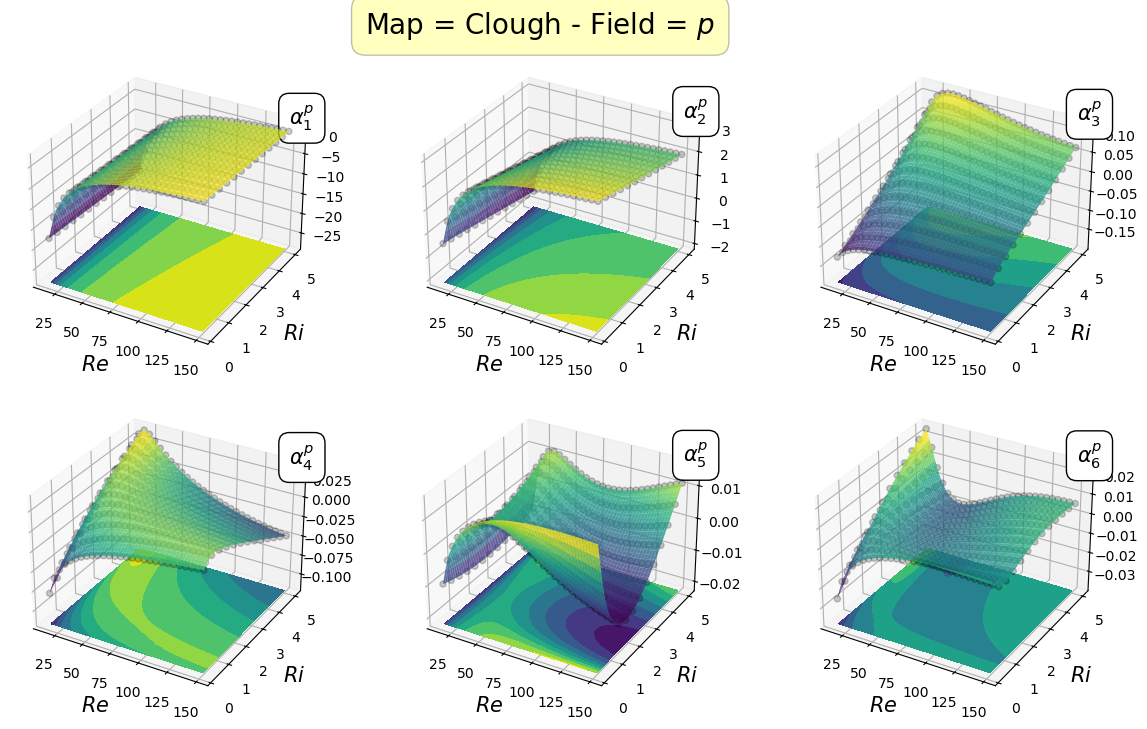
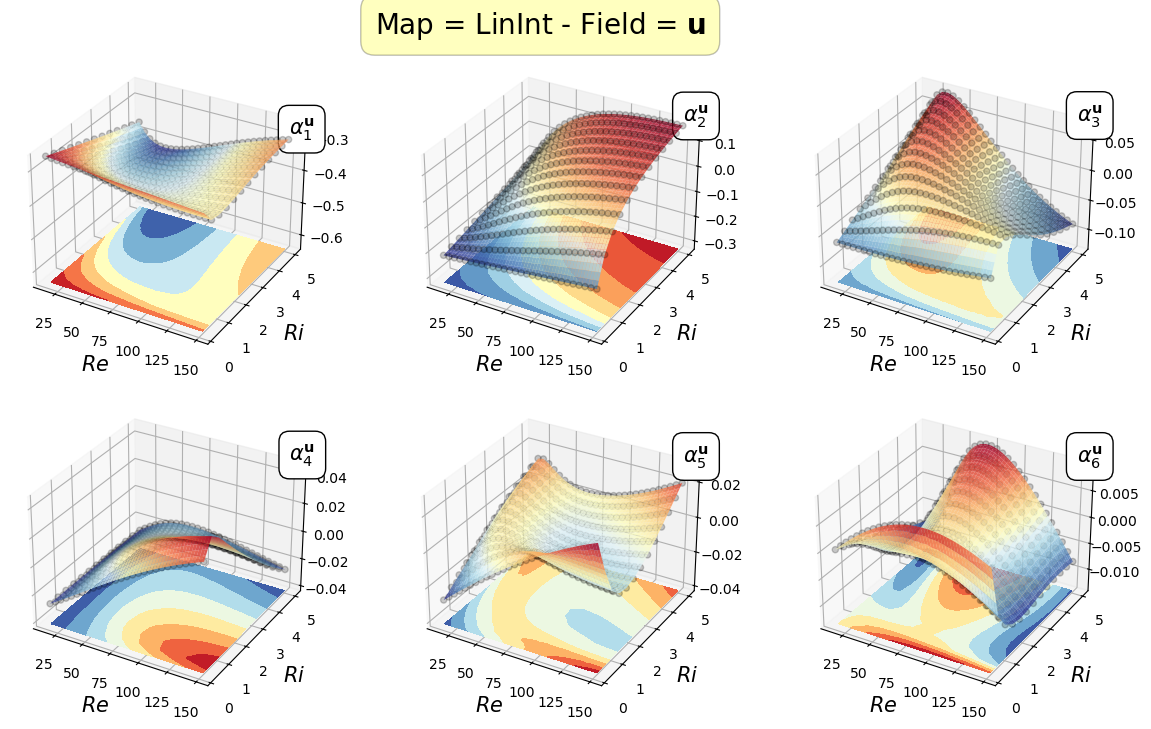
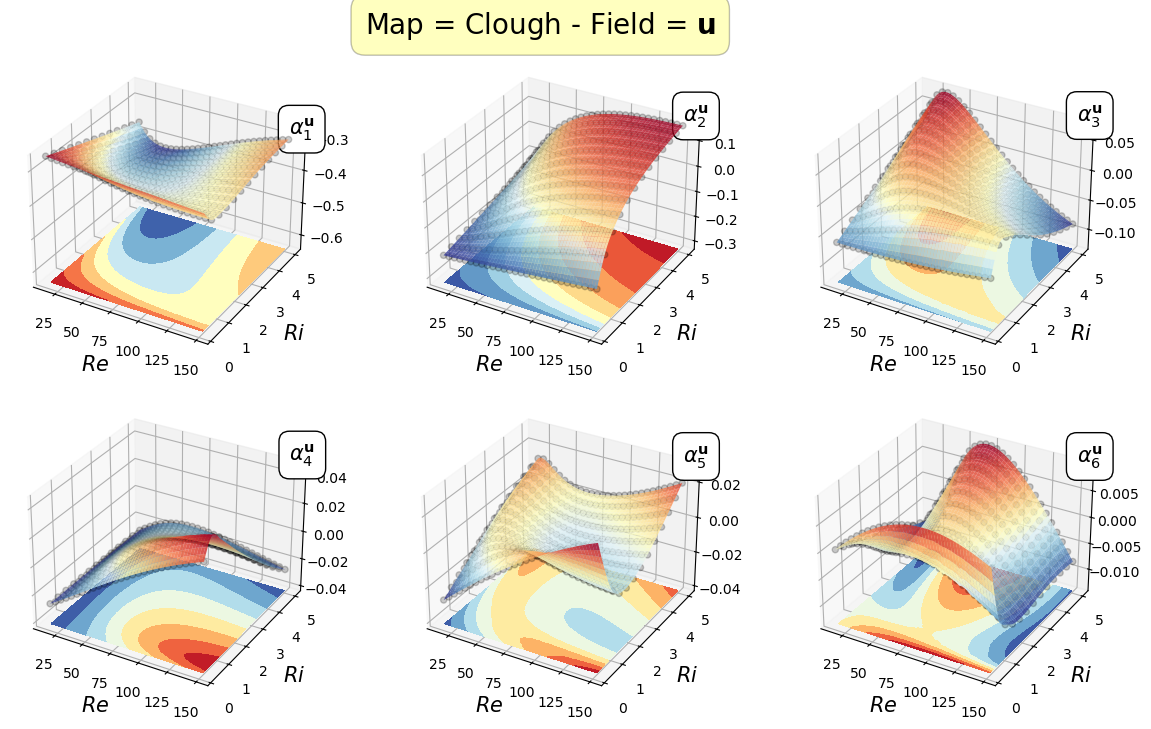
Mapping the coefficients of the non-observable fields
In this section, the reduced coordinate obtained by the POD procedure, i.e., \(\boldsymbol{\alpha}^p\) and \(\boldsymbol{\alpha}^\mathbf{u}\), non-observable fields (pressure and velocity in this case) will be mapped \begin{equation*} \mathcal{F}_p: \boldsymbol{\mu} \longrightarrow \boldsymbol{\alpha}^p(\boldsymbol{\mu})\qquad \mathcal{F}_{\mathbf{u}}: \boldsymbol{\mu} \longrightarrow \boldsymbol{\alpha}^{\mathbf{u}}(\boldsymbol{\mu}) \end{equation*}
In the online phase, once the parameter is determined by the Parameter Estimation phase, the reduced coefficients of the non-observable fields are reconstructed using the POD-I explained in tutorial 1.
[18]:
pod_maps = dict()
Nmax = 20
for field in pod_var_names:
pod_maps[field] = dict()
pod_maps[field]['LinInt'] = [interp.LinearNDInterpolator(mu_train, pod_coeffs[field][:, rank]) for rank in range(Nmax)]
pod_maps[field]['Clough'] = [interp.CloughTocher2DInterpolator(mu_train, pod_coeffs[field][:, rank], rescale=True) for rank in range(Nmax)]
Before plotting, we can store them using pickle
[19]:
pickle.dump(pod_maps, open(path_offline+'maps.pod', 'wb'))
Let us plot the first coefficients
[22]:
cmaps = [cm.viridis, cm.RdYlBu_r]
for field_i, field in enumerate(pod_var_names):
Re_plot = np.linspace(min(mu_train[:,0]), max(mu_train[:,0]), 200)
Ri_plot = np.linspace(min(mu_train[:,1]), max(mu_train[:,1]), 100)
xx, yy = np.meshgrid(Re_plot, Ri_plot)
nrows = 2
ncols = 3
for map in list(pod_maps[field].keys()):
fig, axs = plt.subplots(nrows = nrows, ncols = ncols, figsize=(5 * ncols, 4 * nrows),
subplot_kw={'projection': '3d'})
axs = axs.flatten()
for rank in range(nrows * ncols):
axs[rank].scatter(mu_train[:,0], mu_train[:,1], pod_coeffs[field][:, rank], c='k', marker ='o', alpha = 0.2)
eval_map = pod_maps[field][map][rank](xx, yy)
surf = axs[rank].plot_surface(xx, yy, eval_map, cmap = cmaps[field_i], alpha=0.8)
axs[rank].contourf(xx, yy, eval_map, cmap = cmaps[field_i], offset = min(pod_coeffs[field][:, rank]) * (1 - 0.5 * np.sign(min(pod_coeffs[field][:, rank]))))
axs[rank].set(zlim=(min(pod_coeffs[field][:, rank]) * (1 - 0.5 * np.sign(min(pod_coeffs[field][:, rank]))), max(pod_coeffs[field][:, rank])))
axs[rank].set_xlabel(r'$Re$', fontsize=15)
axs[rank].set_ylabel(r'$Ri$', fontsize=15)
axs[rank].text(max(Re_plot), max(Ri_plot), max(pod_coeffs[field][:, rank]) * 1.1, r'$\alpha_{'+str(rank+1)+'}^'+pod_tex_var_names[field_i]+'$', fontsize=15,
bbox=dict(facecolor='white', edgecolor='black', boxstyle='round,pad=0.5', alpha=1))
fig.subplots_adjust(hspace=0.1, wspace=0.05, top = 0.925)
fig.suptitle('Map = '+map+' - Field = $'+pod_tex_var_names[field_i]+'$', fontsize=20, bbox=dict(facecolor='yellow', edgecolor='black', boxstyle='round,pad=0.5', alpha=0.25))